
 |
|
Associate Professor / 副教授、博士生导师 @ School of Artificial Intelligence, Beijing Normal University
Email: huangss@bnu.edu.cn OR shishenghuang.net@gmail.com
|
|
|
I am an associate professor at School of Artificial Intelligence, Beijing Normal University. I got my PhD degree from Graphics & Geometric Computing Group , Tsinghua University under guidance of Prof. Shi-Min Hu in 2015.
My current research interests include:
- Online 3D Reconstruction (增量式三维重建)
- 4D Reconstruction and Avatars (动态三维重建及数字人)
- vSLAM (视觉即时定位与建图)
- Deep Geometry Learning (几何深度学习)
有博士招生名额1名,感兴趣的同学可以邮件联系
News
2026/04 EP-Talk is accepted by IEEE TVCG with major revision.
2026/04 GANG is accepted by IEEE TVCG.
2026/03 Vivid-Animator is accepted by ICME 2026.
2026/02 EmoDiffTalk is accepted by CVPR 2026.
2026/02 DynaDepth is accepted by IEEE TVCG.
2025/12 MGS-SLAM is accepted as Journal by CVM 2026.
2025/08 国自然面上项目《动态神经隐式实景三维的精准重建和沉浸呈现研究》(No.62572060)获批立项资助.
2025/08 One paper GS-RoadPatching is conditionally accepted by SIGGRAPH Asia 2025 (conference paper).
2025/07 A survey paper on Generative 3D Reconstruction is accepted by JCST.
2025/06 Two papers (GCRayDiffusion and RTMap) are accepted by ICCV 2025.
2025/05 EGAvatar is accepted by IEEE TVCG.
2025/03 One paper is accepted by ICME.
2025/02 EGAvatar is accepted by IEEE TVCG with minor revision.
2025/02 RGAvatar is accepted by IEEE TVCG.
2024/12 One paper is accepted by IEEE VR 2025 (Accepted as TVCG Paper).
2024/09 RGAvatar, Self-SupervisedDepthCompletion are accepted by IEEE TVCG with major revision.
2024/06 GP-Recon is accepted by IEEE TVCG.
2024/05 One paper is accepted by ICML 2024.
2024/03 One paper is conditionally accepted by SIGGRAPH 2024.
2023/12 Two papers are accepted by AAAI 2024.
2023/10 One paper is accepted by ACM MM 2023.
Publications
Including ACM TOG/SIGGRAPH/SIGGRAPH Asia (6), IEEE TVCG (10) and ICCV/CVPR/ICML/VR/ACMMM/AAAI (10) papers.
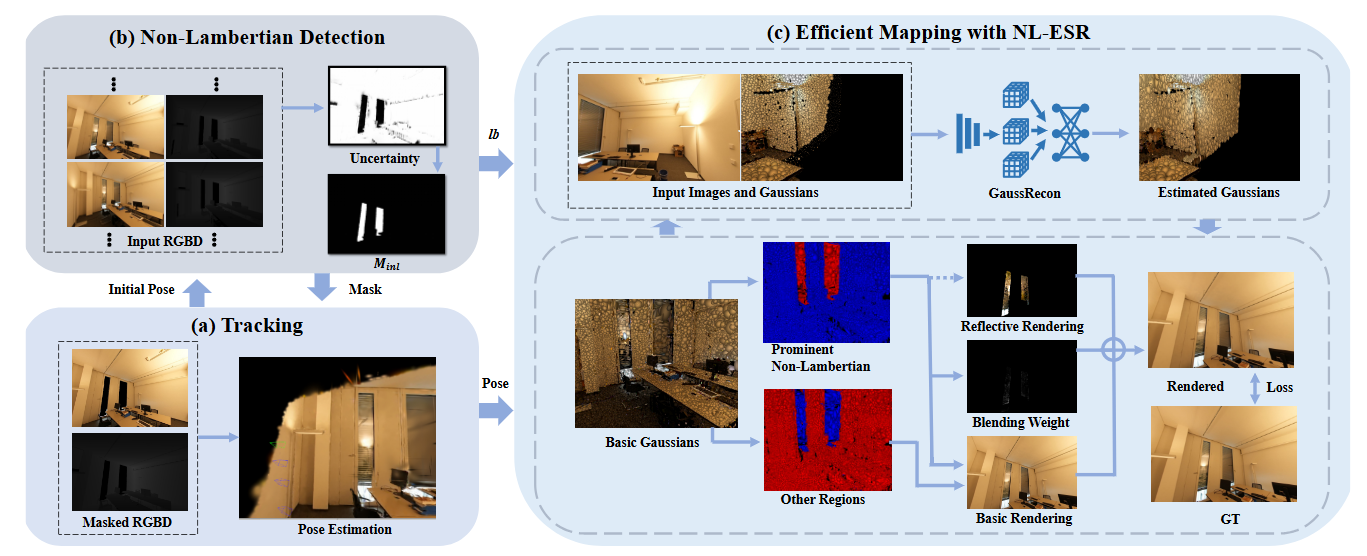 |
NLGS-SLAM: Robust Gaussian Splatting SLAM against Non-Lambertian Interference Tongtai Cao, Shi-Sheng Huang, Xuefeng Yang, Kaiyue Guo, Yue Liu. IEEE transactions on Visualization and Computer Graphics (TVCG), under review
|
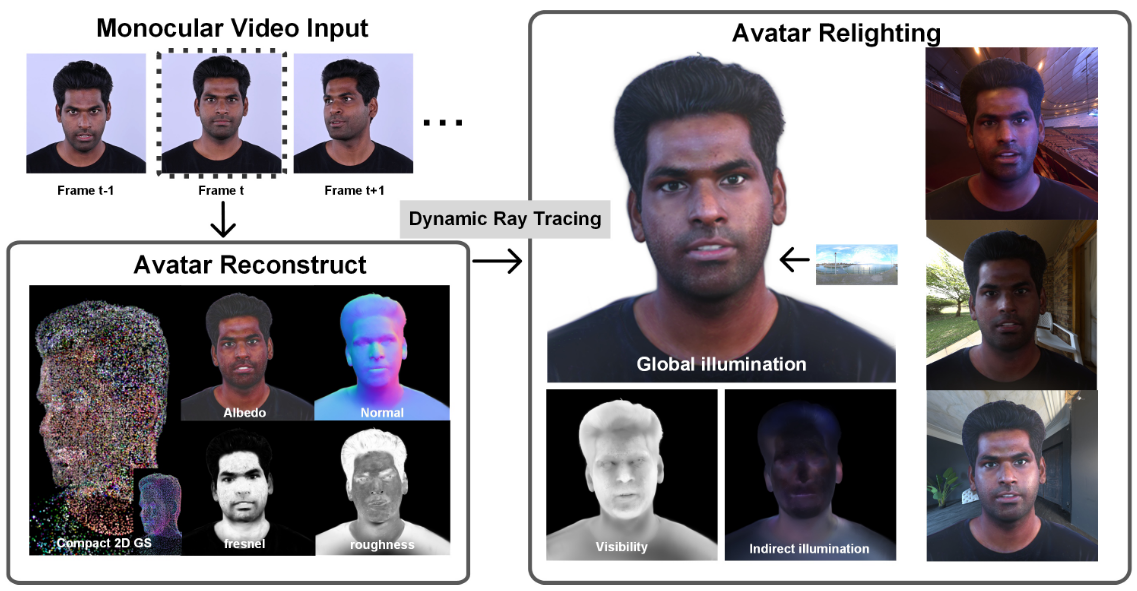 |
D-RayAvatar: Dynamic Ray-tracing based Relightable Gaussian Avatar from Monocular Videos Zhe Fan, Shi-Sheng Huang, ZhaoChen Li, Hua Huang*. IEEE transactions on Visualization and Computer Graphics (TVCG), under review
|
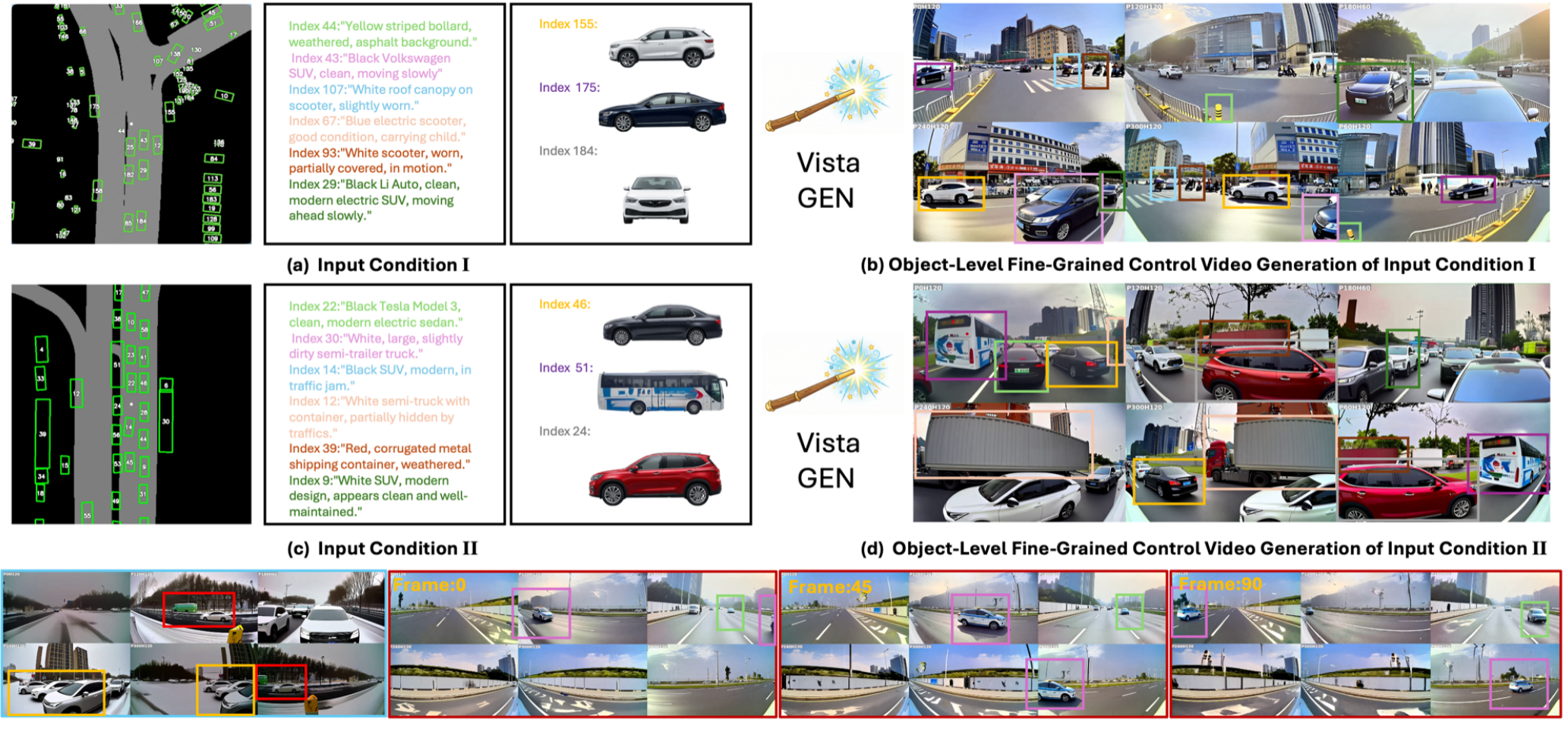 |
VistaGEN: Consistent Driving Video Generation with Fine-Grained Control Using Multiview Visual-Language Reasoning Li-Heng Chen, Ke Cheng, Yahui Liu, Lei Shi, Shi-Sheng Huang*, Hongbo Fu* [arXiv] preprint IEEE transactions on Visualization and Computer Graphics (TVCG), under review
|
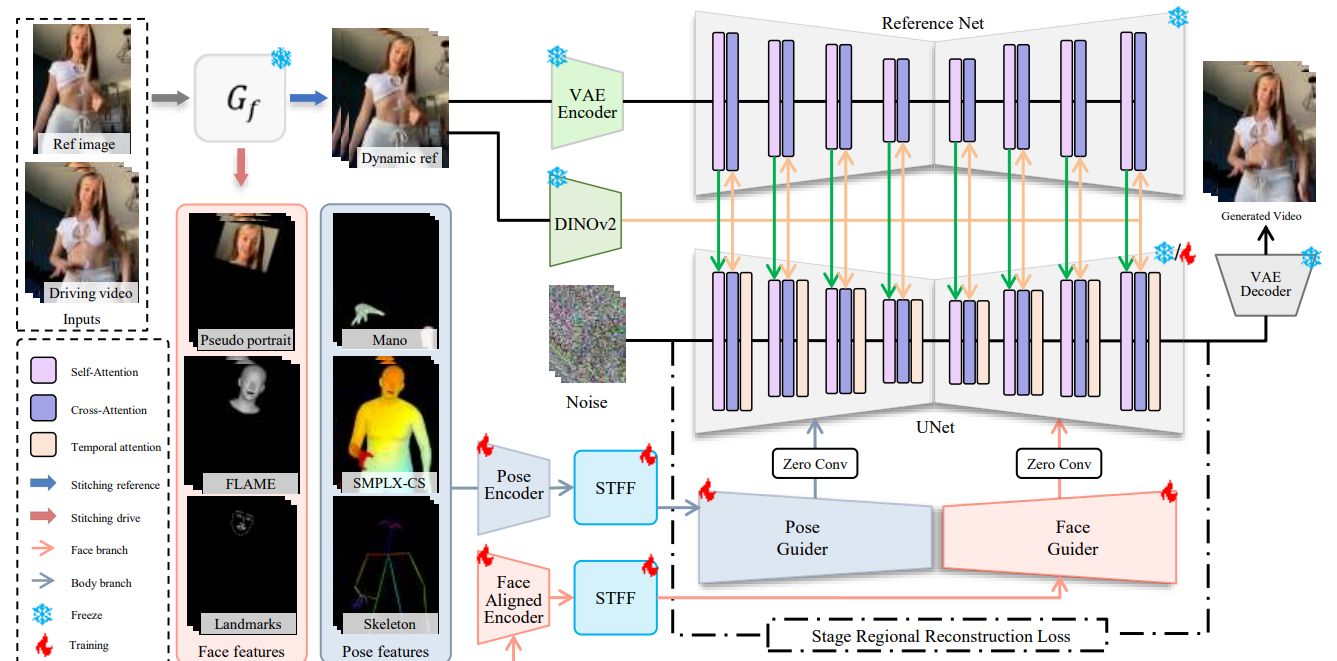 |
Vivid-Animator: Expressive and Controllable Human Animation with Facial-Body Hybrid Guidance Wei Duan, Hao-Pan Ren, Deqi Li, Shi-Sheng Huang, Hua Huang*. ICME 2026
|
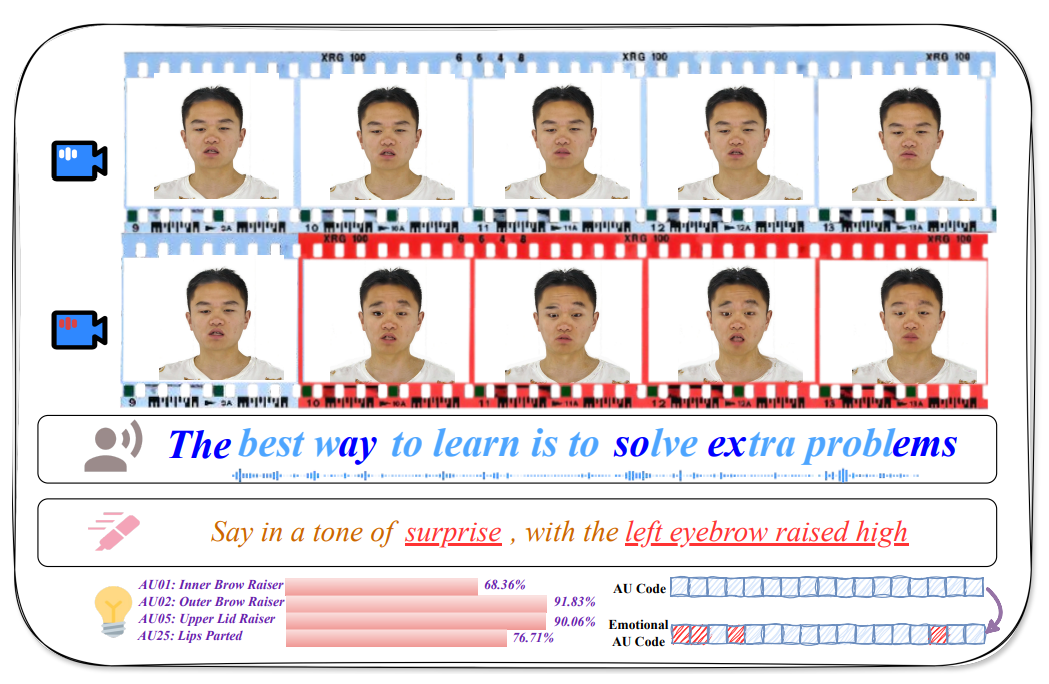 |
EmoDiffTalk:Emotion-aware Diffusion for Editable 3D Gaussian Talking Head Chang Liu, Tianjiao Jing, Chengcheng Ma, Xuanqi Zhou, Zhengxuan Lian, Qin Jin, Hongliang Yuan, Shi-Sheng Huang*. [arXiv] preprint IEEE CVPR 2026 Accepted
|
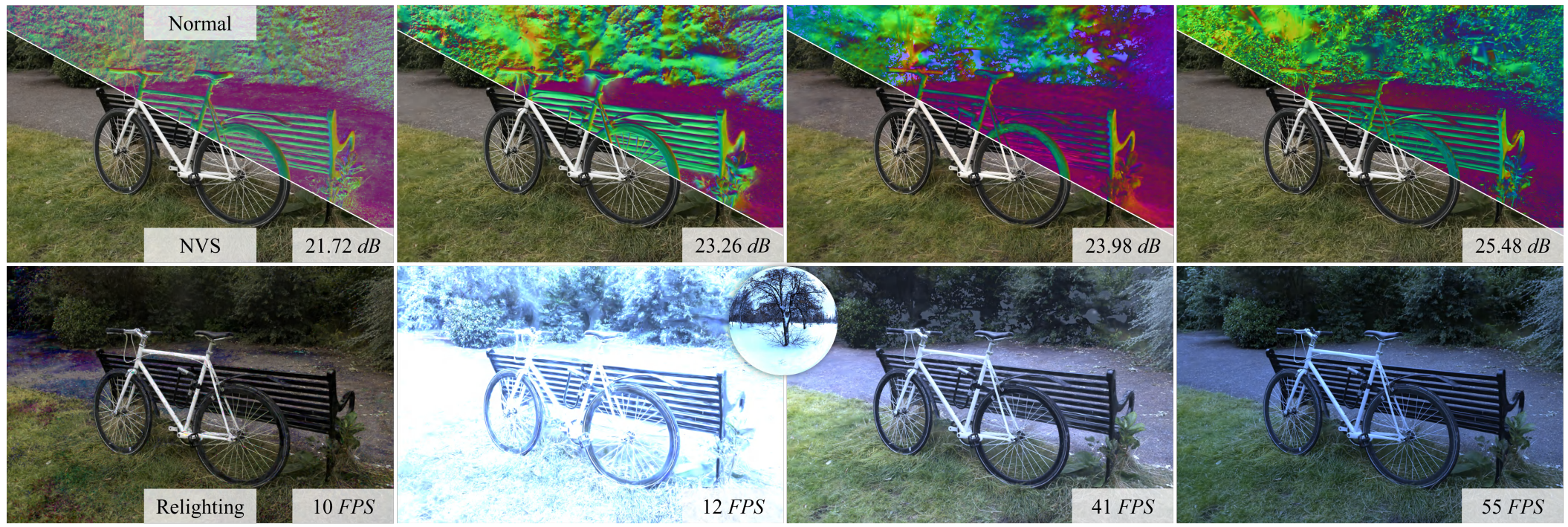 |
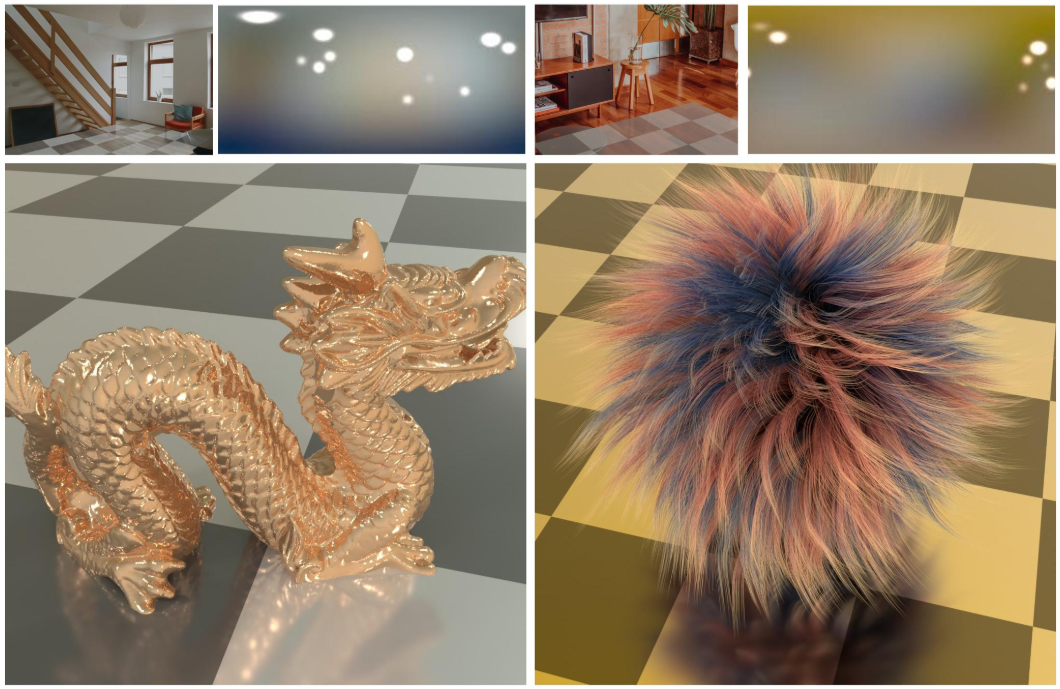
GANG: Geometrically-Aligned Neural Gaussians for Efficient and Realistic Relighting Deqi Li, Shi-Sheng Huang, Hongbo Fu, Hua Huang*. IEEE transactions on Visualization and Computer Graphics (TVCG), Accepted, 2026
|
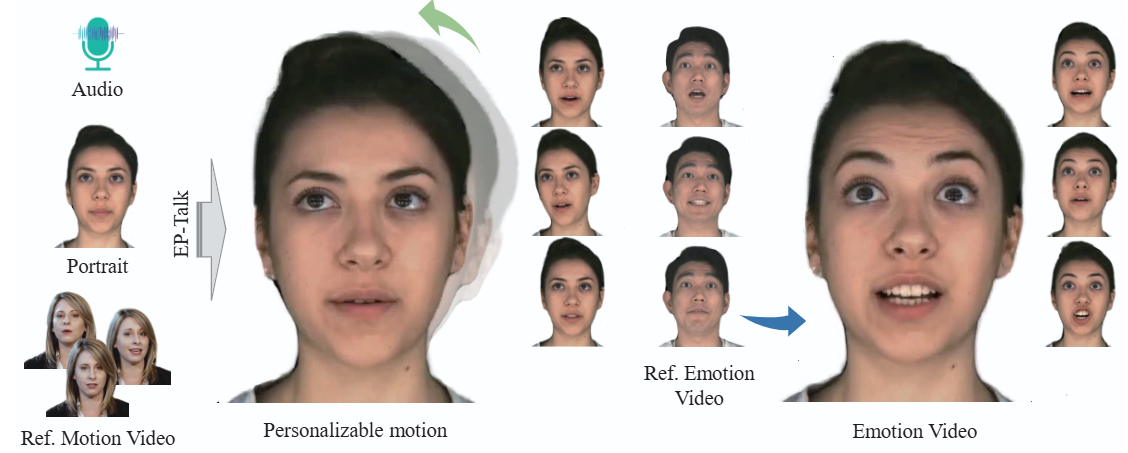 |
EP-Talk: Emotion-awre Personalizable Talking Head Generation Hao-Pan Ren, Shi-Sheng Huang, Wei Duan, Wan-Yu Li, Hua Huang*. IEEE transactions on Visualization and Computer Graphics (TVCG), Major Revision
|
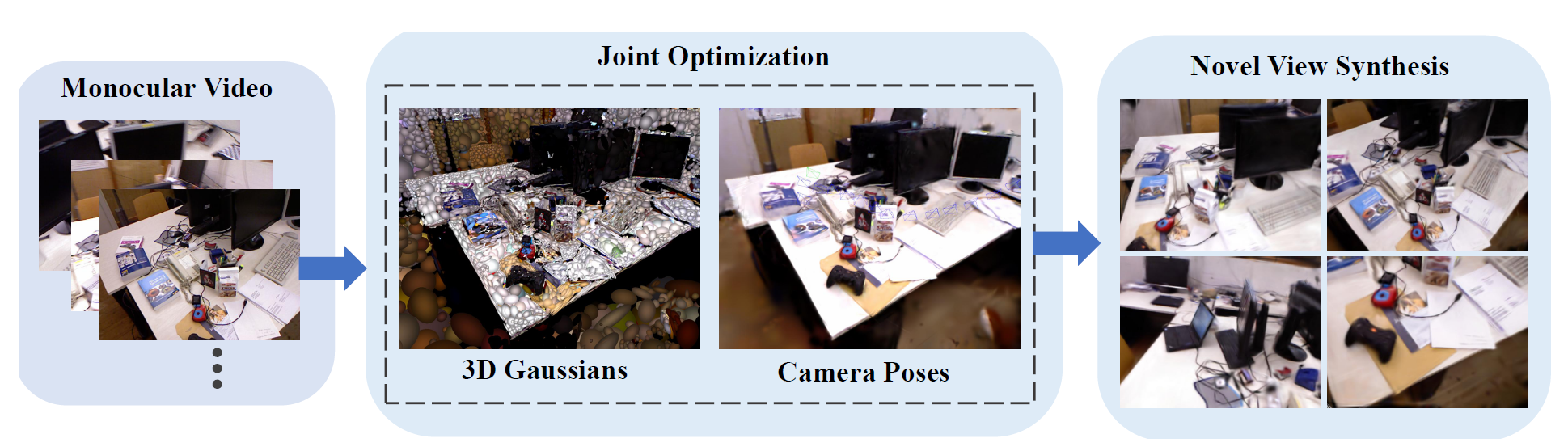 |
MGS-SLAM: Monocular 3D Gaussian Splatting SLAM with Significance-Guided Pruning Tongtai Cao, Shi-Sheng Huang*, Kaiyue Guo, Hao Sha, Deqi Li , Yue Liu*. CVM 2026, Computational Visual Media Journal
|
 |
GS-RoadPatching: Inpainting Gaussians via 3D Searching and Placing for Driving Scenes Guo Chen#, Jiarun Liu#, Sicong Du, Chenming Wu, Deqi Li, Shi-Sheng Huang*, Guofeng Zhang, Sheng Yang*. (* Correpsonding Author) ACM SIGGRAPH Asia 2025, Conference
|
 |
A Survey of Recent Advances in Generative 3D Reconstruction Shi-Sheng Huang, Shao-Kui Zhang, Sheng Yang, Jian-Wei Guo, Hua Huang. Journal of Computer Sciene and Technoloty, JCST
|
 |
RTMap: Real-Time Recursive Mapping with Change Detection and Localization Yuheng Du, Sheng Yang, Lingxuan Wang, Zhenghua Hou, Chengying Cai, Zhitao Tan, Mingxia Chen, Shi-Sheng Huang, Qiang Li. ICCV 2025
|
 |
GCRayDiffusion: Pose-Free Surface Reconstruction via Geometric Consistent Ray Diffusion Li-Heng Chen, Zi-Xin Zou, Chang Liu, Tianjiao Jing, Yan-Pei Cao, Shi-Sheng Huang*, Hongbo Fu, Hua Huang. ICCV 2025
|
 |
EGAvatar: Efficient GAN Inversion for Generalizable Head Avatar from Few-shot Images Hao-Pan Ren, Wei Duan, Wan-Yu Li, Yi Liu, Yu-Dong Guo, Shi-Sheng Huang, Ju-Yong Zhang, Hua Huang*. IEEE transactions on Visualization and Computer Graphics (TVCG), Accept, 2025
|
 |
Self-Supervised Depth Completion Guided by 3D Perception and Geometry Consistency Yu Cai, Tianyu Shen, Shi-Sheng Huang, Hua Huang*. [arXiv] preprint arXiv:2312.15263 IEEE transactions on Visualization and Computer Graphics (TVCG), Accept
|
 |
MixLight: Borrowing the Best of both Spherical Harmonics and Gaussian Models Xinlong Ji, Fangneng Zhan, Shijian Lu, Shi-Sheng Huang, Hua Huang. [arXiv] preprint arXiv:2404.12768
|
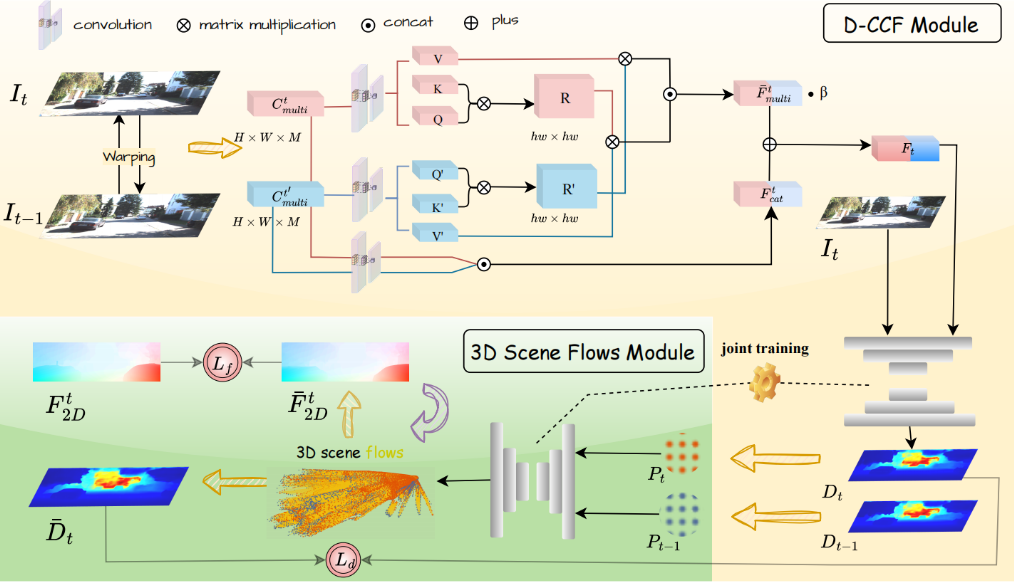 |
Spatio-Temporally Consistent Depth Estimation for Dynamic Scenes using 3D Scene Flows Yu Cai, Chang Liu, Tianjiao Jing, Zhenxuan Lian, Shi-Sheng Huang*, Hua Huang. ICME 2025
|
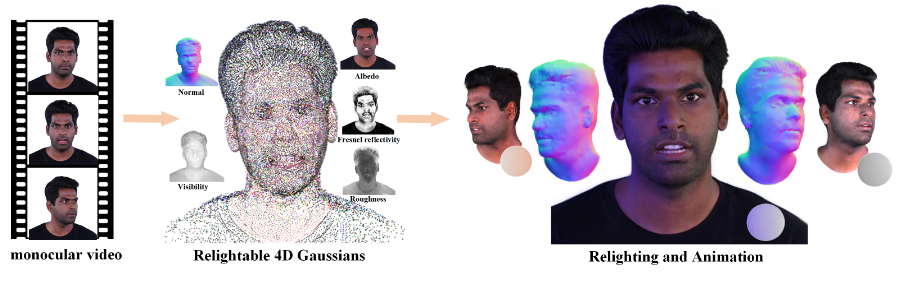 |
RGAvatar: Relightable 4D Guassian Avatar from Monocular Videos Zhe Fan, Shi-Sheng Huang, Yichi Zhang, Dachao Shang, Juyong Zhang, Yudong Guo, Hua Huang*. [arXiv] preprint IEEE transactions on Visualization and Computer Graphics (TVCG), Accept, 2025
|
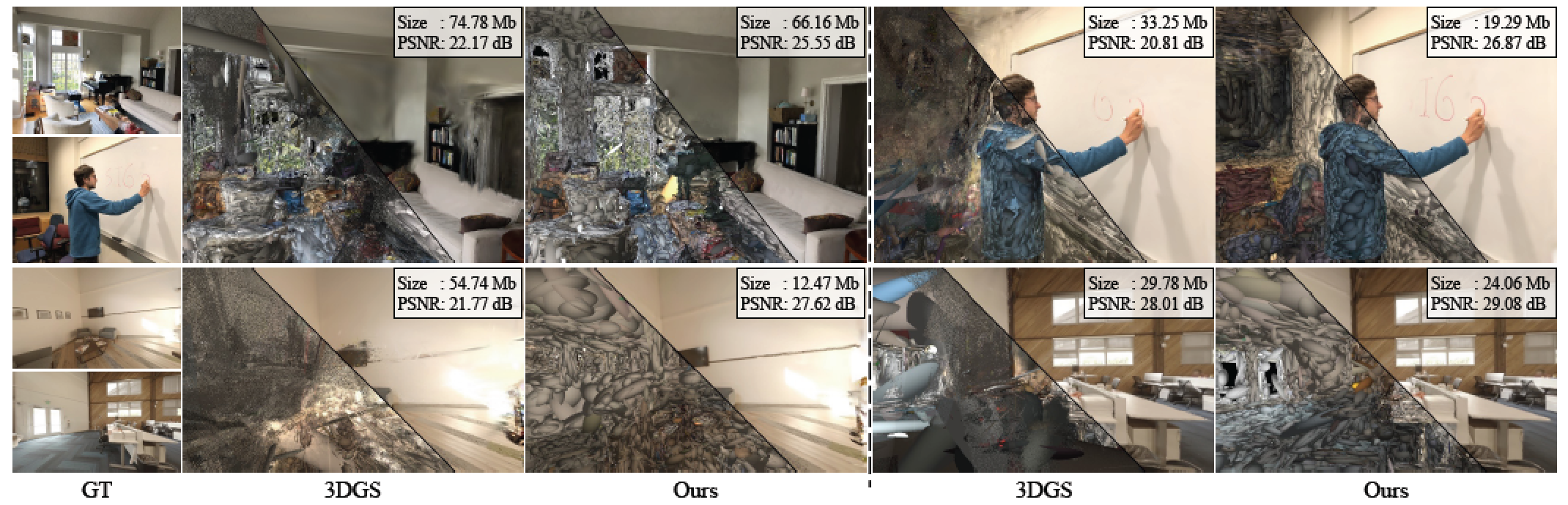 |
MPGS: Multi-plane Gaussian Splatting for Compact Scenes Rendering Deqi Li, Shi-Sheng Huang, Hua Huang. [arXiv] preprint IEEE VR 2025 (Accepted as TVCG Paper)
|
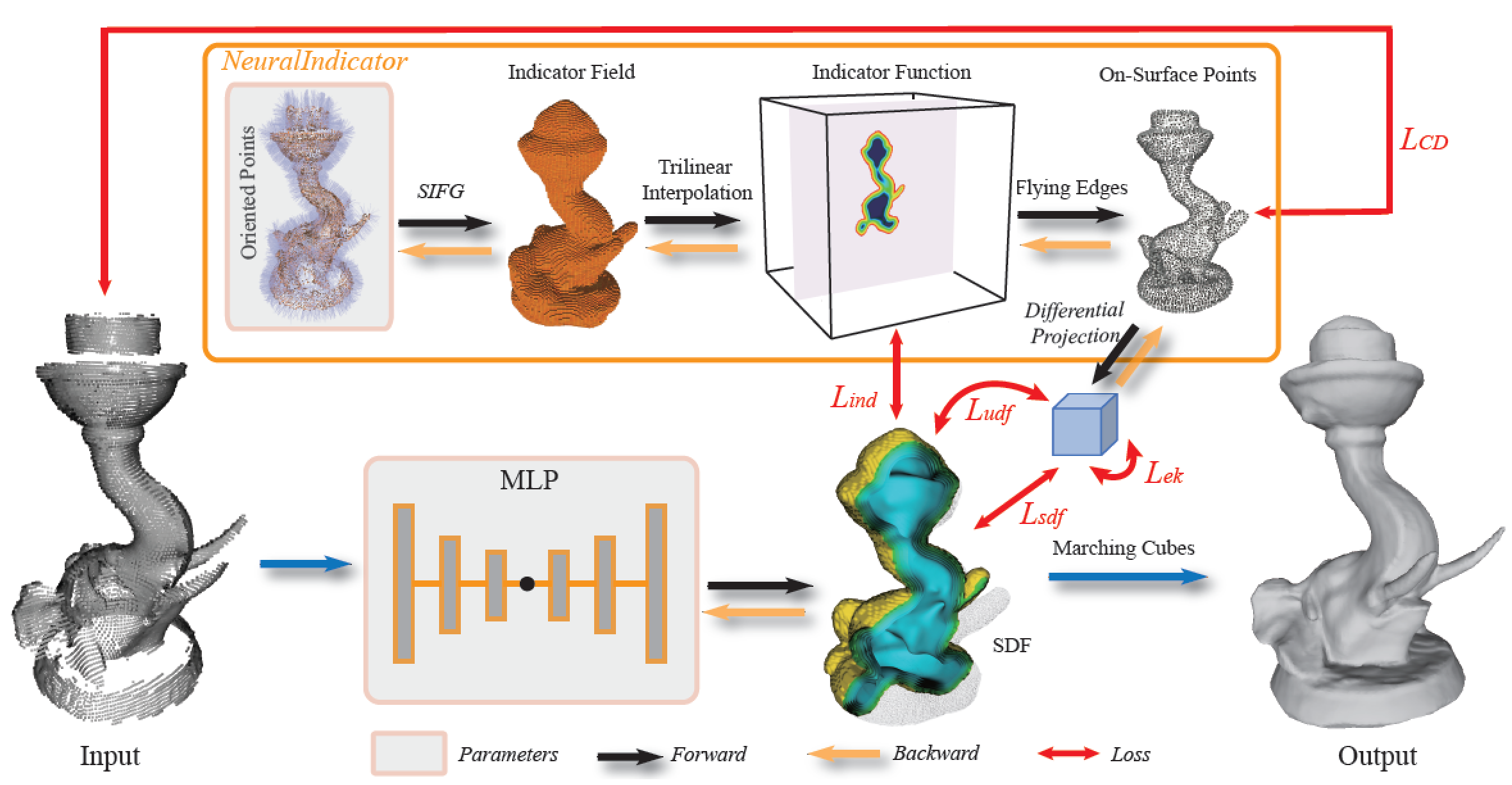 |
NeuralIndicator: Implicit Surface Optimization with Neural Indicator Priors Shi-Sheng Huang, Guo Chen, Liheng Chen, Hua Huang ICML 2024
|
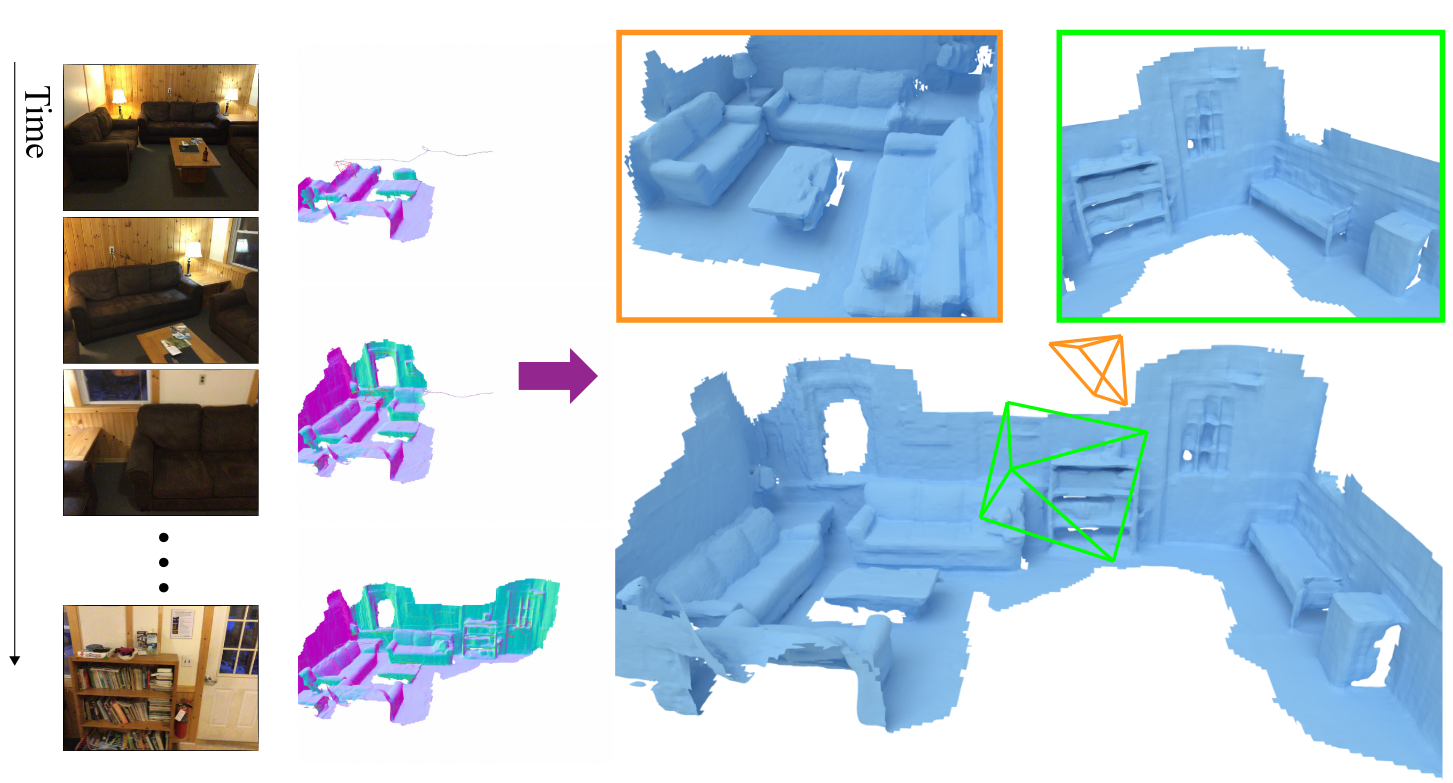 |
GP-Recon: Online Monocular Neural 3D Reconstruction with Geometric Prior Zi-Xin Zhou, Shi-Sheng Huang*, Yan-Pei Cao, Tai-Jiang Mu, Ying Shan, Hongbo Fu, Song-Hai Zhang*. (* Correpsonding Author) [arXiv] preprint arXiv:2209.15153 IEEE transactions on Visualization and Computer Graphics (TVCG), accept
|
 |
ST-4DGS: Spatial-Temporally Consistent 4D Gaussian Splatting for Efficient Dynamic Scene Rendering Deqi Li, Shi-Sheng Huang, Zhiyuan Lu, Xinran Duan, Hua Huang*. (* Correpsonding Author) [arXiv] preprint ACM SIGGRAPH 2024, Conference
|
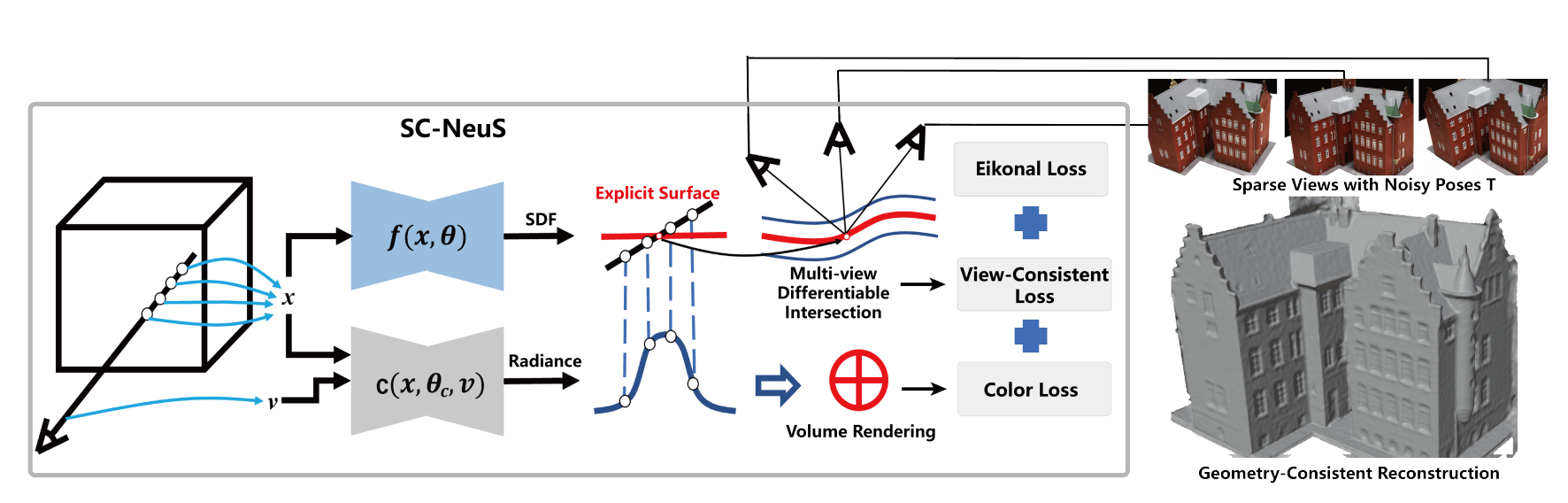 |
SC-NeuS: Consistent Neural Surface Reconstruction from Sparse and Noisy Views Shi-Sheng Huang, Zi-Xin Zou, Yi-Chi Zhang, Yan-Pei Cao, Ying Shan. AAAI 2024, Accepted
|
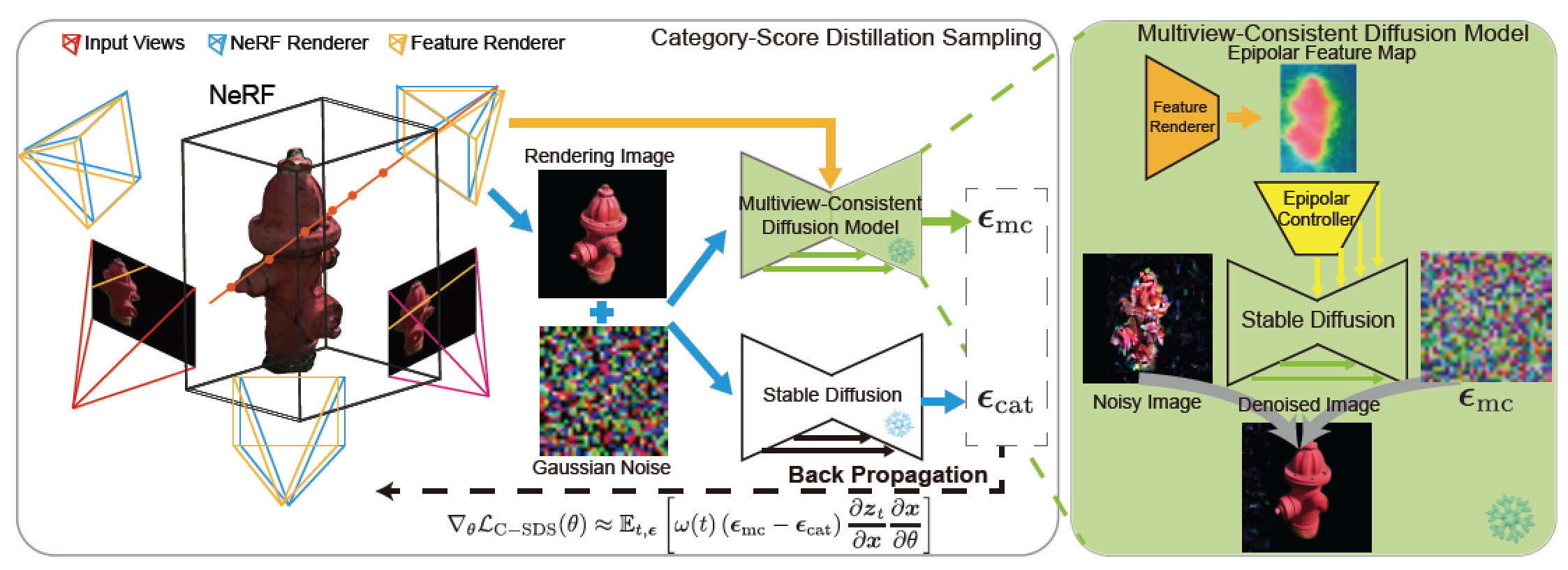 |
Sparse3d: Distilling multiview-consistent diffusion for object reconstruction from sparse views Zi-Xin Zou, Weihao Cheng, Yan-Pei Cao, Shi-Sheng Huang, Ying Shan, Song-Hai Zhang. AAAI 2024, Accepted
|
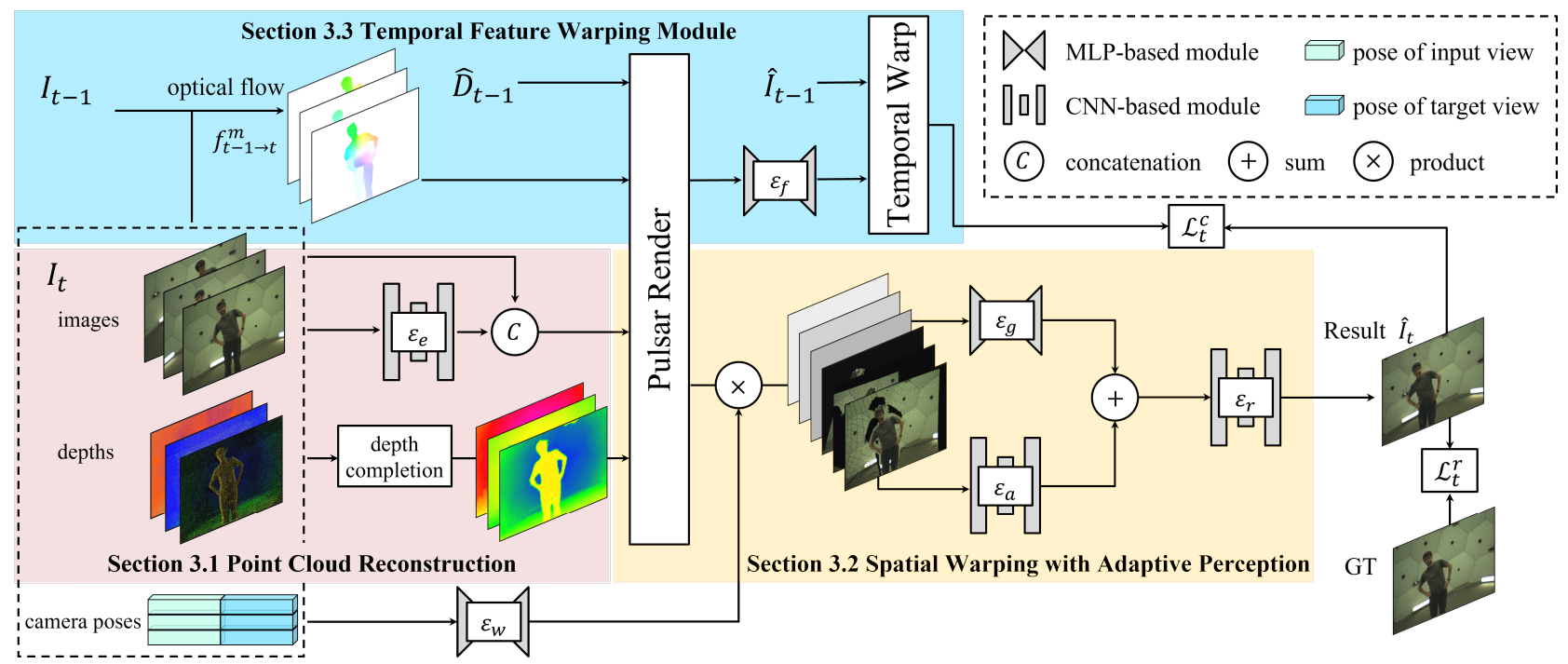 |
Dynamic View Synthesis with Spatio-Temporal Feature Warping from Sparse Views Deqi Li, Shi-Sheng Huang*, Tianyu Shen, Hua Huang. (* Correpsonding Author) ACM MM 2023 Accepted
|
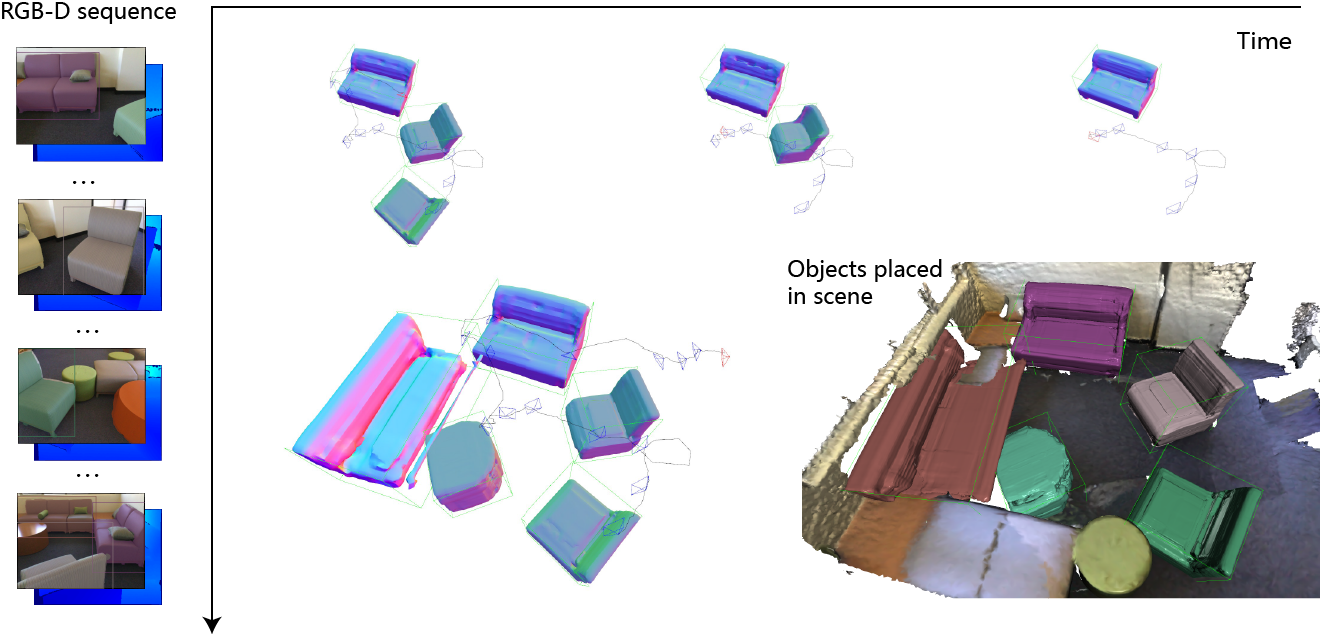 |
ObjectFusion: Accurate Object-level SLAM with Neural Object Priors Zi-Xin Zhou, Shi-Sheng Huang*, Tai-Jiang Mu, Yu-Ping Wang. (* Correpsonding Author) CVM 2022, recommended to Graphical Models
|
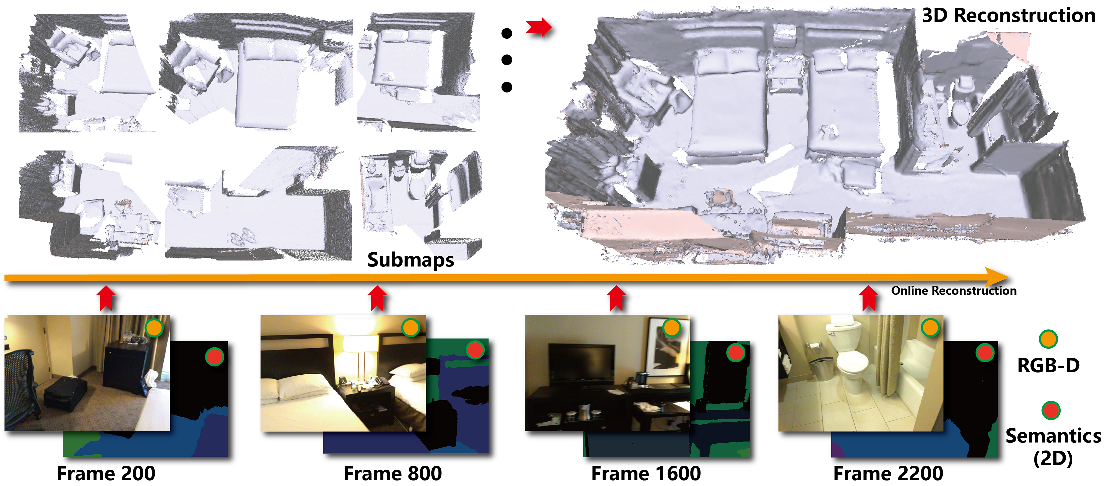 |
Real-Time Globally Consistent 3D Reconstruction with Semantic Priors Shi-Sheng Huang, HaoXiang Chen, Jiahui Huang, Hongbo Fu, Shi-Min Hu. IEEE transactions on Visualization and Computer Graphics (TVCG), Accept, 2021
|
 |
DI-Fusion: Online Implicit 3D Reconstruction with Deep Priors Jiahui Huang, Shi-Sheng Huang*, Haoxuan Song, Shi-Min Hu. IEEE CVPR 2021:8932-8941 https://openaccess.thecvf.com/content/CVPR2021/papers/Huang_DI-Fusion_Online_Implicit_3D_Reconstruction_With_Deep_Priors_CVPR_2021_paper.pdf
|
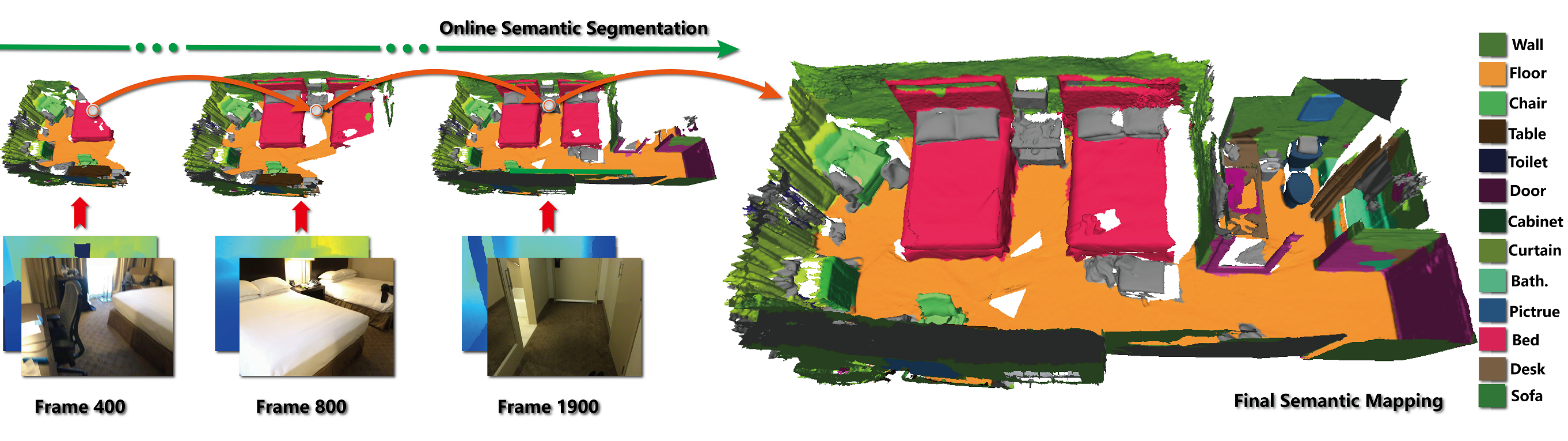 |
Supervoxel Convolution for Online 3D Semantic Segmentation Shi-Sheng Huang, Ze-Yu Ma, Tai-Jiang Mu, Hongbo Fu, Shi-Min Hu. ACM Transactions on Graphics, Vol. 40, No. 3, 2021
|
 |
Accurate Dynamic SLAM using CRF-based Long-term Consistency Zheng-Jun Du*, Shi-Sheng Huang*, Tai-Jiang Mu, Qunhe Zhao, Ralph Martin, Kun Xu. IEEE transactions on Visualization and Computer Graphics (TVCG) 2020 DOI:10.1109/TVCG.2020.3028218
|
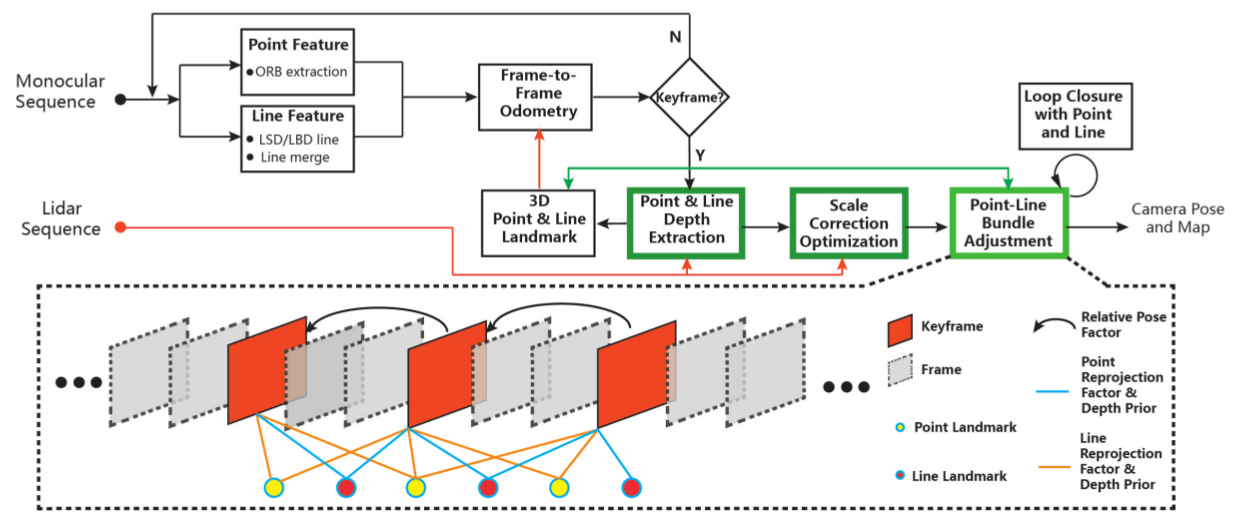 |
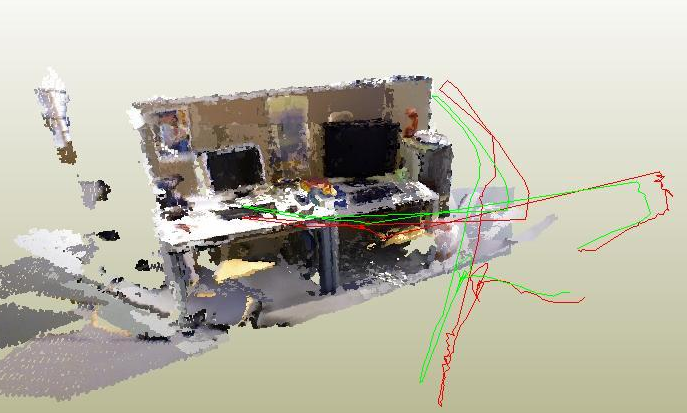
LiDAR-Monocular Visual Odometry using Point and Line Features Shi-Sheng Huang, Ze-Yu Ma, Tai-Jiang Mu, Hongbo Fu, Shi-Min Hu. ICRA 2020:1091-1097
|
 |
Accurate RGB-D SLAM in Dynamic Environments using Observationally Consistent Conditional Random Fields Zheng-Jun Du, Shi-Sheng Huang, Tai-Jiang Mu, Qunhe Zhao, Ralph Martin, Kun Xu. Accepted by CVM 2020
|
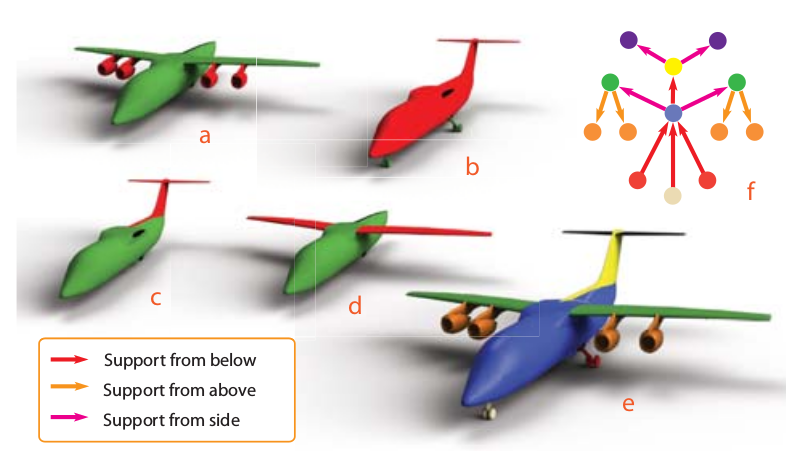 |
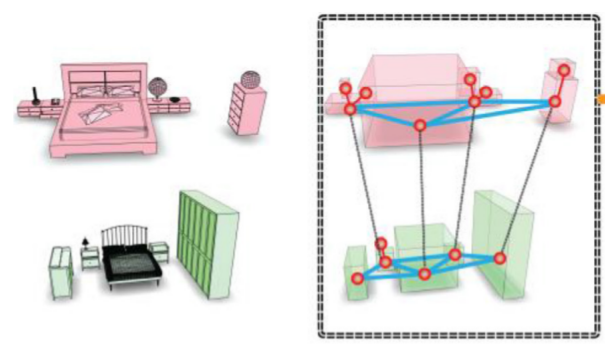
Support Substructures: Support-Induced Part-Level Structural Representation Shi-Sheng Huang, Hongbo Fu, Ling-Yu Wei, and Shi-Min Hu. IEEE transactions on Visualization and Computer Graphics (TVCG), 22(8): 2024-2036 (2016). |
 |
Structure guided interior scene synthesis via graph matching Shi-Sheng Huang, Hongbo Fu, and Shi-Min Hu. Graphical Models, 85: 46-55 (2016). |
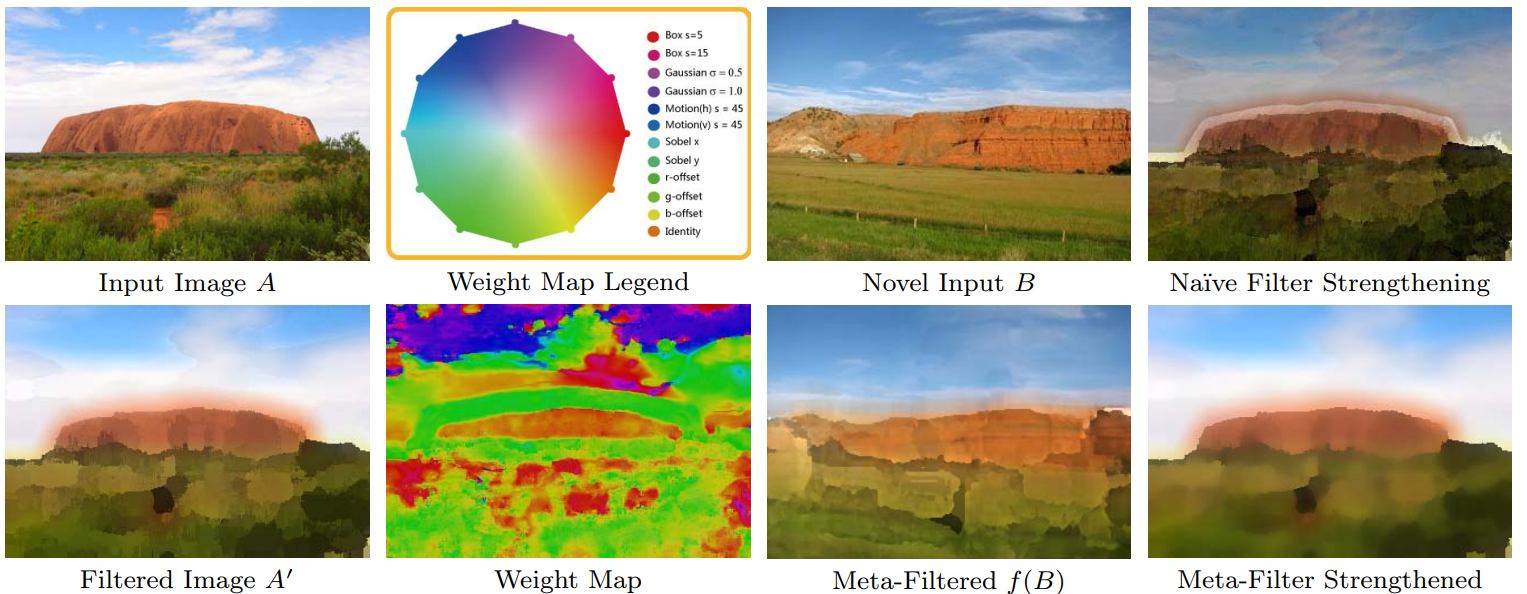 |
Parametric Meta-Filter Modeling from a Single Example Pair Shi-Sheng Huang, Guo-Xin Zhang, Yu-Kun Lai, Johannes Kopf, Daniel Cohen-Or, and Shi-Min Hu. Accepted by CGI 2014, The Visual Computer 30(6-8): 673-684 (2014).
|
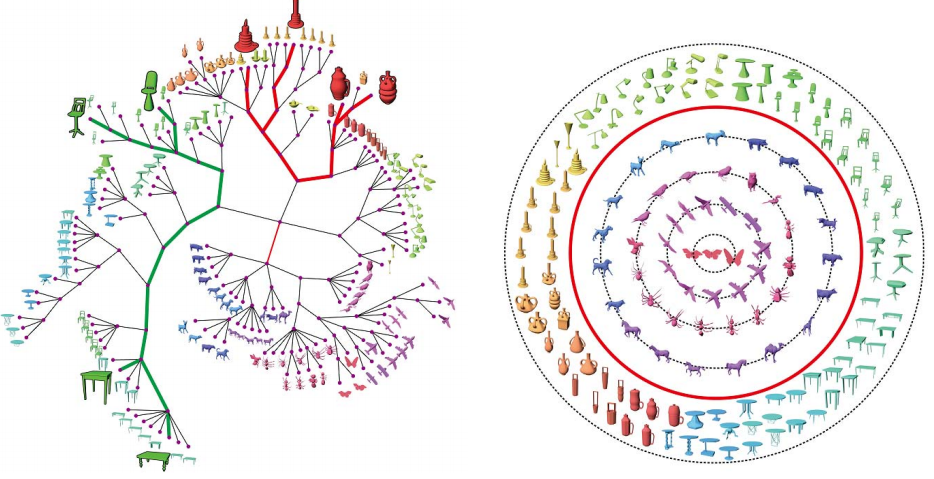 |
Qualitative Organization of Collections of Shapes via Quartet Analysis Shi-Sheng Huang, Ariel Shamir, Chao-Hui Shen, Hao Zhang, Alla Sheffer, Shi-Min Hu, and Daniel Cohen-Or. ACM Transactions on Graphics (Proceedings of SIGGRAPH 2013), 32(4): 71:1-71:10 (2013).
|
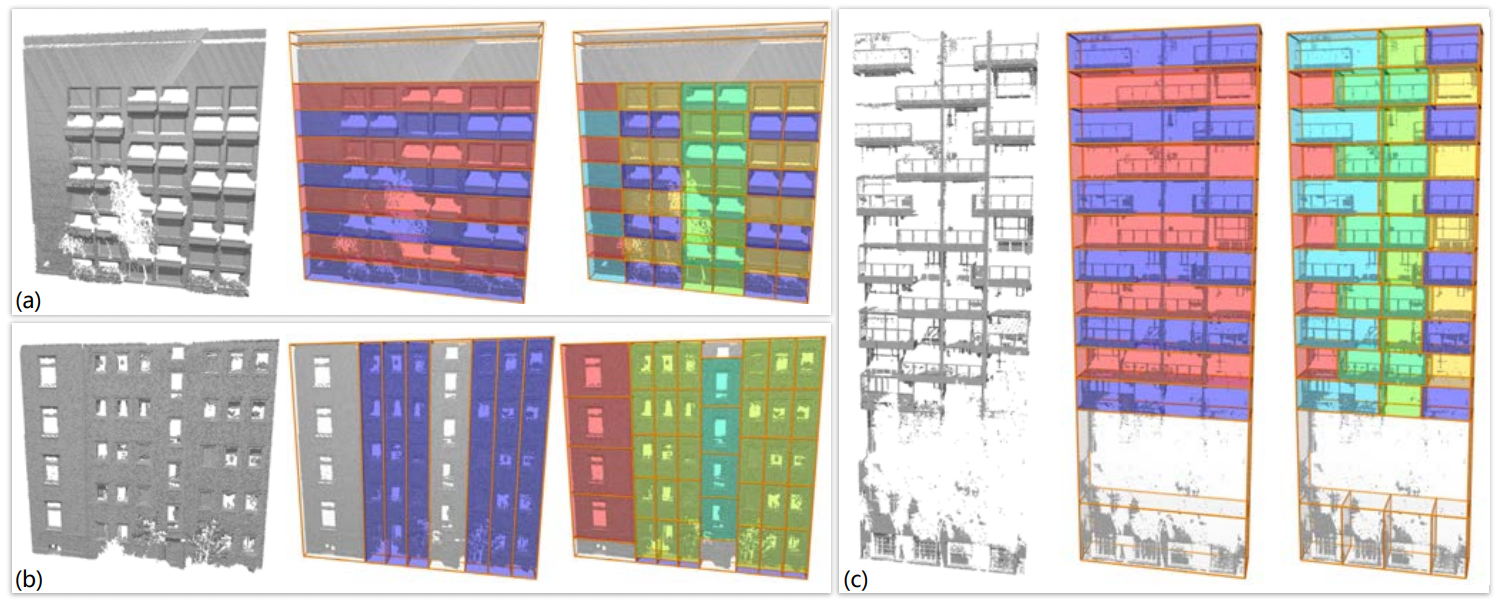 |
Adaptive Partitioning of Urban Facades Chao-Hui Shen, Shi-Sheng Huang, Hongbo Fu, Shi-Min Hu. ACM Transactions on Graphics (Proceedings of SIGGRAPH Asia 2011), 30(6): Article 184.
|
 |
Popup: Automatic Paper Architectures from 3D Models Xian-Ying Li, Chao-Hui Shen, Shi-Sheng Huang, Tao Ju, and Shi-Min Hu. ACM Transactions on Graphics (Proceedings of SIGGRAPH 2010), 29(4): article 111.
|
vSLAM应用
I spent about two years on multi-sensor-fusion-based vSLAM for a low-cost commercial vaccum cleaner robots, including mono-VIO, mono-odometry, mono-inertial-odometry vSLAM etc. There following two works are the reprensentive works with some of which were successfully applied on products like [Bob-Pethair-Vision]..
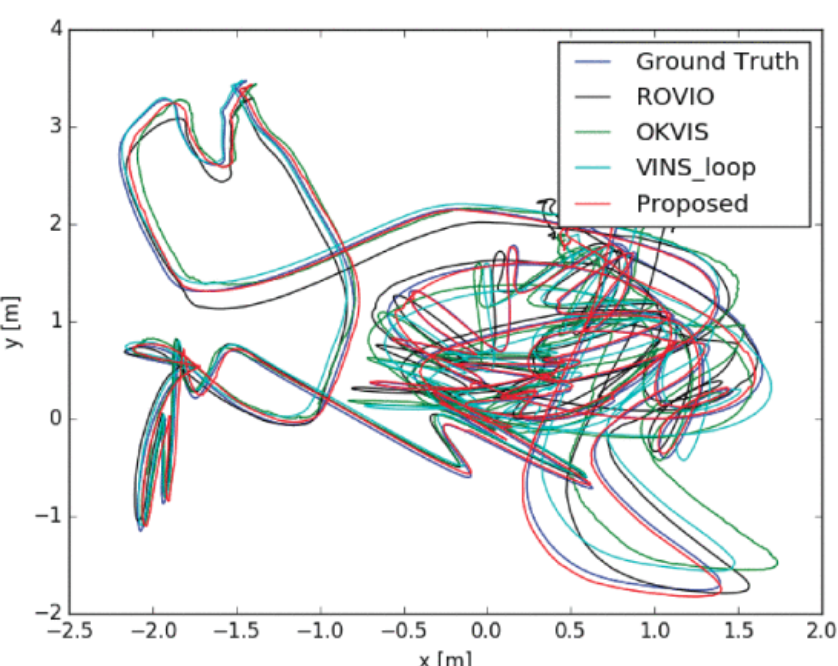 |
Accurate Monocular Visual-inertial SLAM using a Map-assisted EKF Approach Meixiang Quan, Songhao Piao, Minglang Tan, Shi-Sheng Huang IEEE Access 7: 34298-34300 (2019). arXiv: https://arxiv.org/abs/1706.03648 This is a high accurate monocular VIO SLAM system, especially on the initialization of Cam-IMU setup /p; |
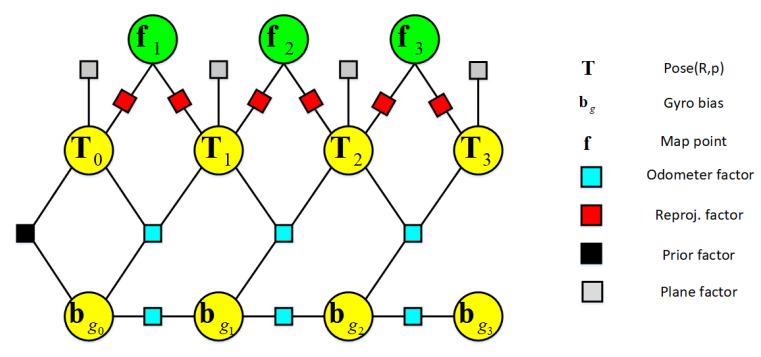 |
Tightly-coupled Monocular Visual-odometric SLAM using Wheels and a MEMS Gyroscope Meixiang Quan, Songhao Piao, Minglang Tan, Shi-Sheng Huang IEEE Access 7: 97374-97389 (2019). arXiv: https://arxiv.org/abs/1804.04854 This is a high accurate monocular-odometry SLAM system, which is the origin of VSLAM Navigation product of Vaccum Cleaner
|
Code/Software
For a Visual-SLAM beginner, you had better prepare a math library for solving the factor graph based Bundle Adjustment problems. I preprared a math library with point-, line-, plane- reprojection factors called MyG2O, please try it!
对于视觉SLAM初学者来说,一个功能完整的数学库(用于求解BundleAdjustment)往往很重要.我准备了一个这样的数学库叫MyG2O, please try it!
[PrePrint[~1M]] [Code[GitHub]]
Education and Experience
I was a postdoc researcher at Graphics & Geometric Computing Group , Tsinghua University in Beijing, working with Prof. Shi-Min Hu.
I got my PhD degree from Graphics and Geometric Computing Group in 2015.
| 2012.9-2013.2 | Tel-Aviv University and IDC(Herzliya), Israel | Visiting Scholar PhD Student. | ||
| 2011.9-2011.11 | School of Creative Media, City Univ. of Hong Kong, Hong Kong | Visiting Research Assistant |
| 2010.9-2015.10 | Department of Computer Science and Technology, Tsinghua University | PhD Degree. | ||
| 2006.9-2010.7 | Information and Computation, School of Science, Beijing Jiao-Tong University | Bachlor Degree, with Honor (Ranked Top 1%.) |
Collaborators
Prof. Shi-Min Hu, Prof. Hongbo Fu, Prof. Kun Xu, Prof. Yu-Kun Lai
Prof. Daniel Cohen-Or, Prof. Ariel Shamir, Prof. Hao Zhang, Prof. Alla Sheffer, Prof. Tao Ju, Dr. Johannes Kopf
My Friends:
Chao-Hui Shen, Xian-Ying Li, Guo-Xin Zhang
Lin Gao, Fang-Lue Zhang, Miao Wang,Tai-Jiang Mu
Academic Services
Reviewer. SIGGRAPH 2023, SIGGRAPH Asia 2023, SIGGRAPH 2024
Reviewer. IEEE VR 2021,2023,2024
Reviewer. EG 2021
Reviewer. PG 2020
Reviewer. GMP 2020
Reviewer. CVM 2013, 2015, 2020
Reviewer. SIGGRAPH 2014,2015, SIGA 2014
Reviewer. Journal Computers & Graphics 2013, 2014, 2015
Reviewer. the Visual Computer 2014, 2015
Reviewer. CAG-D 2014,2015, SPM 2014,2015, 2021, CGI 2013,2014,2015
Reviewer. IEEE TVCG 2014, 2015
Reviewer. SGP 2015, EG 2015
Funding
China Postdoctoral Science Foundation (Grant No.: 2019M660646)
Awards and Honors
2013 - Tsinghua Friends--Tencent Outstanding Innovation Scholarship Award
2010 - Outstanding College Graduates in Beijing, Outstanding College Graduates of Beijing Jiao-Tong University.
2009 - Yi-Seng Mao Scholar, Yi-Sheng Mao Science and Education Foundation.
2006-2010 - Many Kinds of Scholars and Honors in Beijing Jiao-Tong University.
2005 - Outstanding High School Student in Hunan.
Notice: All the digital papers and videos in this page are the authors' version for personal use only.
Last updated by Shi-Sheng Huang, May, 2021 in Beijing.
